


को कार्य सिद्धान्तग्रहीय रोलर स्क्रूयो हो: मिल्दो मोटरले स्क्रूलाई घुमाउन चलाउँछ, र मेशिङ रोलरहरू मार्फत, मोटरको घुमाउरो गति नटको रेखीय पारस्परिक गतिमा रूपान्तरण हुन्छ। ग्रहीय रोलर स्क्रूले सर्पिल गति र ग्रहीय गतिलाई संयोजन गर्दछ, जुन उच्च प्रदर्शन आवश्यकताहरू भएका व्यापक परिस्थितिहरूको लागि धेरै उपयुक्त छ।
ग्रहीय रोलर स्क्रू चित्रमा देखाइएको छ। यसको मुख्य घटकहरू हुन्:
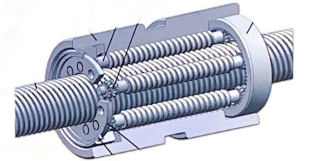
पेंच, यसको थ्रेड प्रोफाइल समकोण त्रिकोण हो (३ हेड र माथिका थ्रेडहरू)
बदाम, यसको आन्तरिक थ्रेड प्रोफाइल स्क्रूको जस्तै छ।
रोलर, एकल-स्टार्ट थ्रेड, प्रत्येक रोलरको छेउमा बेलनाकार पिभोट र बाफलको गोलाकार प्वालमा गियर पिभोट जडान गरिएको हुन्छ ताकि रोलरहरू रेडियल दिशामा समान रूपमा वितरित हुन्छन्। गियर दाँतहरू आन्तरिक रिंग गियरसँग जोडिएका हुन्छन्, जसले रोलरलाई सहज रूपमा अगाडि बढ्न अनुमति दिन्छ।
Rइटेनिङ रिङ,बाफल बन्द गर्दै।
फ्ल्याट कुञ्जीसंचालित वस्तुहरू जडान गर्न प्रयोग गरिन्छ। यसको संरचना सरल छ, छुट्याउन र भेला गर्न सजिलो छ, र राम्रो हेजिङ गुणहरू छन्। यो उच्च गति, परिवर्तनशील भार र प्रभाव परिस्थितिहरूको लागि उपयुक्त छ।
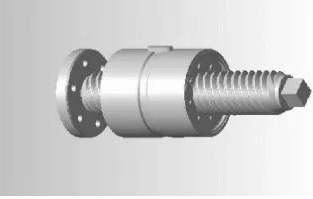
रिभर्स प्लानेटरी रोलर स्क्रू, जसलाई रिभर्स रोलर स्क्रू र रिभर्स प्लानेटरी रोलर स्क्रू पनि भनिन्छ, ले एक रेखीय प्रसारण उपकरणलाई बुझाउँछ जसमा रोलर व्यवस्था वा चाल दिशा परम्परागत ग्रहीय रोलर स्क्रूको विपरीत हुन्छ।
रिभर्स प्लानेटरी रोलर स्क्रूको आकार सानो र भार ठूलो हुन्छ। फ्रेमलेस मोटरको साथ, यसलाई ह्युमनोइड रोबोट हात, खुट्टा, हिप जोर्नी, आदिको लागि प्रयोग गर्न सकिन्छ।
मानक ग्रहीय रोलर स्क्रूहरूमा उच्च गति, बलियो भार-वाहक क्षमता, र उच्च परिशुद्धताका फाइदाहरू छन्। प्रभावकारी स्ट्रोक एक मिटर भन्दा बढी पुग्न सक्छ, जसले गर्दा तिनीहरूलाई अत्यन्तै भारी भार वातावरणको लागि धेरै उपयुक्त बनाउँछ।
स्क्रू नयाँ रिलीज पोइन्टको लागि ह्युमनोइड रोबोट। ट्र्यापेजोइडल स्क्रू रबल स्क्रूमेकानिकल मेसिन उपकरणहरूको क्षेत्रमा परिपक्व प्रयोग भएको छ, ग्रहीय रोलर स्क्रू हाल उड्डयन र अन्य उच्च-अन्त अनुप्रयोगहरूमा मात्र छ। टेस्ला ह्युमनोइड मेसिन १४ रैखिक कुञ्जीले ८-१० रोलर स्क्रू प्रयोग गर्नेछ।
पोस्ट समय: डिसेम्बर-०६-२०२४




