

को सिद्धान्तस्क्रू स्टेपर मोटर: संलग्न हुनको लागि एउटा स्क्रू र नट प्रयोग गरिन्छ, र स्क्रू र नटलाई एकअर्काको सापेक्षमा घुम्नबाट रोक्नको लागि एउटा निश्चित नट लिइन्छ, जसले गर्दा स्क्रू अक्षीय रूपमा सार्न अनुमति दिन्छ। सामान्यतया, यो रूपान्तरण महसुस गर्ने दुई तरिकाहरू छन्।
पहिलो भनेको मोटरमा आन्तरिक थ्रेडहरू सहितको रोटर निर्माण गर्नु र महसुस गर्नु होरेखीय गतिरोटर र स्क्रूको आन्तरिक थ्रेडहरू संलग्न गरेर, जसलाई पेनिट्रेटिङ स्क्रू स्टेपिङ मोटर भनिन्छ। (नट मोटर रोटरसँग एकीकृत हुन्छ र स्क्रू शाफ्ट मोटर रोटरको केन्द्रबाट जान्छ। प्रयोगमा हुँदा, स्क्रू फिक्स गर्नुहोस् र एन्टी-रोटेशन गर्नुहोस्, जब मोटर पावर अप हुन्छ र रोटर घुम्छ, मोटर स्क्रूसँगै रेखीय रूपमा सर्नेछ। (यसको विपरित, यदि स्क्रू एन्टी-रोटेशन बनाउँदा मोटर फिक्स गरिएको छ भने, स्क्रूले रेखीय गति गर्नेछ)
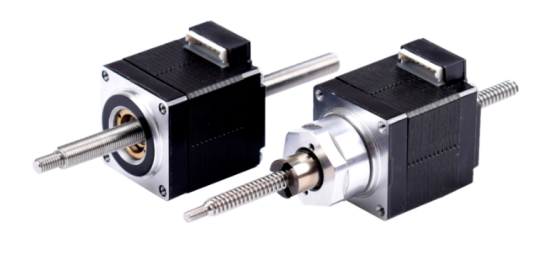
अक्ष-प्रकार
दोस्रो भनेको लिनु होपेंचमोटर आउट शाफ्टको रूपमा, मोटरमा बाह्य ड्राइभ नट र स्क्रू संलग्नता मार्फत रेखीय गति महसुस गर्न, यो बाह्य ड्राइभ प्रकारको स्क्रू स्टेपिङ मोटर हो। परिणामस्वरूप, धेरै सरलीकृत डिजाइनले धेरै अनुप्रयोगहरूमा सटीक रेखीय गतिलाई बाह्य मेकानिकल लिंकेज स्थापना नगरी स्क्रू स्टेपर मोटरसँग प्रत्यक्ष रूपमा प्रदर्शन गर्न सक्षम बनाउँछ। (नट मोटरको बाहिरी भाग हो र ड्राइभ मेकानिज्मसँग जोडिएको हुन्छ। जब मोटर घुम्छ, नट स्क्रूसँगै रेखीय रूपमा सर्छ।)
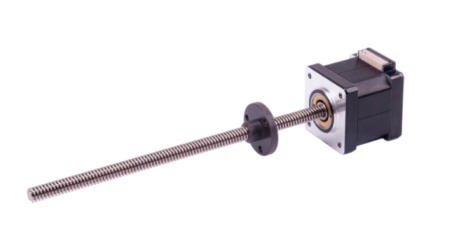
बाह्य ड्राइभ प्रकार
थ्रु-अक्ष रेखीय स्टेपिङ मोटरको अनुप्रयोग फाइदाहरू:
बाह्य रूपमा संचालित रेखीय स्टेपर मोटरहरू संयोजनमा प्रयोग गरिने अनुप्रयोग परिदृश्यहरूको तुलना गर्दैरेखीय गाइडवेहरू, थ्रु-एक्सिस रेखीय स्टेपर मोटर्सका आफ्नै अनौठा फाइदाहरू छन्, जुन मुख्यतया निम्न ३ पक्षहरूमा प्रतिबिम्बित हुन्छन्:
1.ठूलो प्रणाली स्थापना त्रुटिलाई अनुमति दिन्छ:
सामान्यतया, यदि बाह्य रूपमा संचालित रेखीय स्टेपर मोटर प्रयोग गरिन्छ भने, स्क्रू र गाइडवे माउन्टिङ बीचको कमजोर समानान्तरताले प्रणाली रोकिने सम्भावना हुन्छ। यद्यपि, थ्रु-अक्ष रेखीय स्टेपर मोटरहरूको साथ, यो घातक समस्यालाई डिजाइनको संरचनात्मक विशेषताहरूको कारणले धेरै कम गर्न सकिन्छ, जसले ठूलो प्रणाली त्रुटिको लागि अनुमति दिन्छ।
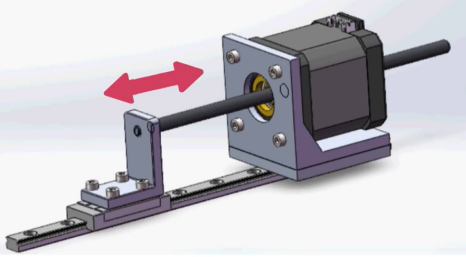
जब मोटर सक्रिय हुन्छ, नट रोटरसँग घुम्छ र स्क्रू बाह्य भारमा जोडिएको हुन्छ र गाइडसँगै सिधा रेखामा सर्छ।
2.स्क्रूको महत्वपूर्ण गतिले सीमित छैन:
जब बाह्य रूपमा संचालित रेखीय स्टेपर मोटरहरू उच्च-गति रेखीय गतिको लागि चयन गरिन्छ, तिनीहरू सामान्यतया स्क्रूको महत्वपूर्ण गति द्वारा सीमित हुन्छन्। यद्यपि, थ्रु-अक्ष रेखीय स्टेपर मोटरको साथ, स्क्रू स्थिर र घुमाउन-विरोधी हुन्छ, जसले मोटरलाई रेखीय गाइडवेको स्लाइडर चलाउन अनुमति दिन्छ। स्क्रू स्थिर भएकोले, उच्च गति महसुस गर्दा यो स्क्रूको महत्वपूर्ण गति द्वारा सीमित हुँदैन।
3.यसले स्थापना ठाउँ बचत गर्छ:
मोटरमा नट बनाइएको संरचनात्मक डिजाइनको कारणले गर्दा थ्रु-एक्सिस लिनियर स्टेपिङ मोटरले स्क्रूको लम्बाइभन्दा बाहिर अतिरिक्त ठाउँ ओगट्दैन। एउटै स्क्रूमा धेरै मोटरहरू माउन्ट गर्न सकिन्छ। मोटरहरू एकअर्काबाट "पास" हुन सक्दैनन्, तर तिनीहरूको चाल एकअर्काबाट स्वतन्त्र हुन्छ। त्यसकारण, यो थप कडा ठाउँ आवश्यकताहरू भएका अनुप्रयोगहरूको लागि उपयुक्त विकल्प हो।
थप जानकारीको लागि, कृपया हामीलाई सम्पर्क गर्नुहोस्amanda@kgg-robot.comवा+डब्ल्यूए००८६ १५२२१५७८४१०.
पोस्ट समय: फेब्रुअरी-११-२०२५




